|
1
|
- Morgan P. Brown* and Robert G. Clapp
- Stanford Exploration Project
- Stanford University
|
|
2
|
|
|
3
|
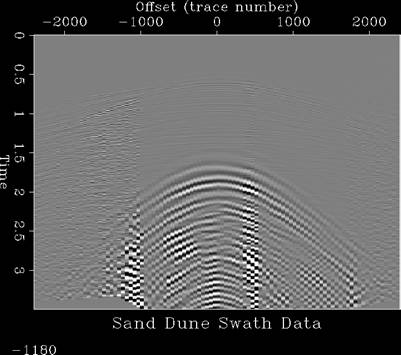
- To first order: Rayleigh (SV) wave.
- Dispersive, often high-amplitude
- In (t,x,y), ground roll = cone.
- Usually spatially aliased.
- In practice, “ground roll cone” muted.
|
|
4
|
- Motivation for advanced separation techniques.
- Model-based signal/noise separation.
- Non-stationary (t,x) PEF.
- Least squares signal estimation.
- Real Data results.
|
|
5
|
- Imaging/velocity estimation for deep targets.
- Rock property inversion (AVO, impedance).
- Single-sensor configurations.
|
|
6
|
- Amplitude-preservation.
- Robustness to signal/noise overlap.
- Robustness to spatially aliased noise.
|
|
7
|
- Motivation for advanced separation techniques.
- Model-based signal/noise separation.
- Non-stationary (t,x) PEF.
- Least squares signal estimation.
- Real Data results.
|
|
8
|
|
|
9
|
- The Noise model: kinematics usually OK, amplitudes distorted.
- Simple subtraction inferior.
- Adaptive subtraction: mishandles crossing events, requires unknown
source wavelet.
- Wiener optimal signal estimation.
|
|
10
|
- Assume:
- data = signal + noise
- signal, noise uncorrelated
- signal, noise spectra known.
|
|
11
|
- Answer: Smoothly non-stationary (t,x) Prediction Error Filter (PEF).
|
|
12
|
- Answer: Smoothly non-stationary (t,x) Prediction Error Filter (PEF).
|
|
13
|
- Motivation for advanced separation techniques.
- Model-based signal/noise separation.
- Non-stationary (t,x) PEF.
- Least squares signal estimation.
- Real Data results.
|
|
14
|
|
|
15
|
|
|
16
|
|
|
17
|
|
|
18
|
|
|
19
|
- Robust for spatially aliased data.
- Handles missing/corrupt data.
- No explicit patches (gates).
- Stability not guaranteed.
|
|
20
|
- Small phase errors.
- Amplitude difference OK.
|
|
21
|
|
|
22
|
- Problem often underdetermined.
- Apply regularization.
|
|
23
|
- Problem often underdetermined.
- Apply regularization.
|
|
24
|
- Use Spitz approach, only in (t,x)
|
|
25
|
- Motivation for advanced separation techniques.
- Model-based signal/noise separation.
- Non-stationary (t,x) PEF.
- Least squares signal estimation.
- Real Data results.
|
|
26
|
|
|
27
|
|
|
28
|
|
|
29
|
|
|
30
|
|
|
31
|
|
|
32
|
- e too small = leftover noise.
- e too large = signal removed.
- Ideally, should pick e = f(t,x).
|
|
33
|
- Motivation for advanced separation techniques.
- Model-based signal/noise separation.
- Non-stationary (t,x) PEF.
- Least squares signal estimation.
- Real Data results.
|
|
34
|
- Saudi Arabian 3-D shot gather - cross-spread acquisition.
- Test on three 2-D receiver lines.
- Strong, hyperbolic ground roll.
- Good separation in frequency.
- Noise model = 15 Hz Lowpass.
|
|
35
|
|
|
36
|
|
|
37
|
|
|
38
|
|
|
39
|
|
|
40
|
|
|
41
|
|
|
42
|
- (t,x) domain, pattern-based coherent noise removal
- Amplitude-preserving.
- Robust to signal/noise overlap.
- Robust to spatial aliasing.
- Parameter-intensive.
|
|
43
|
- Saudi Aramco
- SEP Sponsors
- Antoine Guitton
|

 Notes
Notes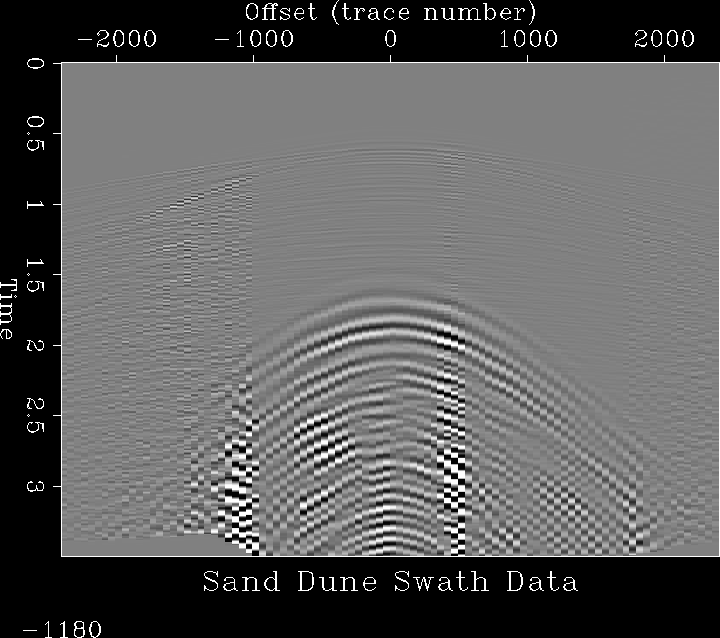{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}